软包电池装配线是锂电池制造中后期工艺的关键部分。它主要负责处理组装或缠绕的裸电池,并执行极耳焊接、胶带、电池外壳和顶部密封等操作。流水线的设计原则以锂电池的生产工艺为基础,同时考虑了电芯尺寸、结构和所需生产效率等因素。
1.概述袋包装装配线
1.1流水线的设计原则和原则
软包电池流水线形式的选择主要取决于电芯的尺寸规格。对于长度在390mm以下的电芯,极耳焊接机、包装机以及包装机的后续段一般采用由凸轮分流器驱动的转盘结构。这种结构布局紧凑,占地面积小。但是,它受到转盘精度的限制。转盘越大,单元的组装精度越差。此外,增加的负载也会影响启动和停止转盘的难度和效率。
对于长度在390mm以上的电芯规格,极耳焊接机、包装机、包装机的后续段一般采用线性结构。这种布局允许在大型电池的station切换过程中进行精确定位,并提供高station切换效率,为提高生产效率提供了更好的潜力。但是,这种布局的缺点是占用的占地面积相对较窄,并且用于站切换的驱动机构更加复杂,导致成本相对较高。线性装配线的布局如下图所示。
1.2集会线效率分配
在施工线的设计过程中,节奏的控制主要取决于每个工位生产的瓶颈工位的限制。例如,实际生产能力要求为8PPM。关于设备的综合生产能力,实际设计一般以10PPM为基础,极限工作限位是以多工位方式进行,如焊机段极耳预焊中的保护板送料机构,极耳焊接中的极耳进料机构、包装机中的上下封包装时间、侧封包装时间等。在比较生产能力要求后,计算每个工位所需的处理时间。如果不满足,则需要多工位设计。例如,当设备效率要求为12PPM时,每个电芯的处理时间和生产时间为5秒。一些客户的包装时间要求达到4到5秒,加上电芯站的切换时间和包装机构的动作时间。,不能满足生产效率要求,因此需要设计一个该工位的双工位,以满足生产效率要求。其他工作站的节拍分布是相同的。
1.3物流方式
组装电池时,必须使用物流在工作站之间转移和切换。因此,不同状态的电池需要选择合理的物流方式。
(1)对于堆垛机排出的裸电池,为了保证电池的运输效率,保护电池的安全,通常采用双速链条+电池夹的方法。双速链运输效率高,适合长期生产。具有运输距离长、负载大、维护简单等优点,双速链型材对设置挡块等辅助结构的安装调整具有很大的灵活性。缺点是双速链条容易产生摩擦并产生灰尘。为了避免灰尘对电池芯的影响,一些制造商使用磁悬浮输送线来运输裸电池,但这很昂贵。
(2)电芯从堆垛机输送到焊接机。焊机上的每个工位对电芯的定位精度都有很高的要求。电芯装入焊接夹具中,采用分步输送方式。为保证精度根据要求,驱动器采用伺服电机+拨叉的循环结构。
(3)电芯从焊机上卸出后,一般采用伺服电机+同步带输送方式。这样可以保证电芯运输的等间距,便于机器人卸货和装货抓取位置的准确性。同样,采用相同的方法后包装机,经济高效。
1.4细胞定位方法和原则
在电芯流水线上,电池制造商在工艺方面对电芯有一定的尺寸精度要求。因此,在电池进入流水线之前,需要对电芯进行定位。电池单元的位置相同。每个后续工位的调整也以此为基础,以保证电池组装的一致性。
电芯本体的形状是矩形的,所以在定位方面,通常用两侧作为定位基准,另外两侧用推来定位电芯。您也可以利用电池本体的中心定位方式,将电池本体向前、向后、向左和向右同时推动。定位方法的选择一般取决于电芯的工艺尺寸要求和结构设计的便利性,只要基准一致即可。
1.5灰尘控制
在电池生产过程中,最致命的危险是金属粉尘进入电池本体,造成电池短路、起火等一系列问题。为了避免这种情况的发生,必须严格控制流水线中的灰尘来源,并尽可能地清除它们。要控制扬尘,首先要找出扬尘的来源,然后采取针对性的措施。
(1)层压机输送线(双速链)。在运输过程中,倍速链会与倍速链轮廓摩擦,产生大量灰尘。对于这种灰尘,需要在双速链线本体上安装防尘板,以防止灰尘落到电池芯上。同时,电池芯夹应尽可能小。输送机通过上下夹紧输送,返回线上的空夹具在固定点进行除尘。除尘方法采用吹气+抽吸方式进行。由于线路比较长,需要增加人工清洁的频率,以防止灰尘堆积等。
(2)流水线。当电池在流水线上循环时,一些工作站本身会产生灰尘,例如极耳的预焊、切割、极耳焊接和焊锡冲压工位。只要有切割或焊接站,它们就会被安装。特殊的除尘机构可实现不间断的集尘。下图显示了除尘站地图。
1.6质量控制
为了保证电池生产质量的稳定性和一致性,在电池生产的各个环节都会有相应的检测传感器进行质量控制。对于流水线,具体表现如下:
(1)颜色传感器用于检测进线电芯的极性,主要是为了防止人工干预后电池反向放电。
(2)扫描电池代码,确保电池信息及时上传到MES系统,便于跟踪电池生产信息。
(3)采用电芯X射线检查,检测电芯的对位情况,防止后续生产严重错位的电池。
(4)极耳极性检测和正负检测,避免焊接误差。
(5)极耳焊接后进行胶水检测,避免在后续包装时焊料印刷品与铝塑薄膜直接接触。
(6)极耳焊接后的CCD尺寸检查,确保电芯生产的尺寸一致性。
(7)焊接后,对电芯进行耐压测试,确保焊接电芯的正负极之间没有导电性。
(8)铝塑膜偏差控制,保证铝塑膜的冲孔成品率。
(9)对电池封装后进行CCD尺寸检测,确保电池外观和尺寸的一致性。
(10)封装后,对电池进行Hi-pot测试,以确保封装电池的正负极之间没有导电性。
(11)对封装后的电池进行绝缘测试,确保封装电芯的正负极与铝塑膜之间没有导电性。
(12)测试电池包装后的密封厚度,确保包装后电池密封的一致性。
通过上述一系列的控制方法和要点,可以有效地控制整个流水线上的电池质量。
二、设备主要功能及说明
锂电池是一种以锂金属或锂合金为负极材料,使用非水电解质溶液的电池。锂电池的主要部件是正负极、电解液、隔膜和外壳。袋装锂电池是将聚合物外壳放置在液态锂离子电池上并用铝塑复合膜包装的电池。与圆柱形电池和铝壳电池相比,电池的成分相同,但电池的包装形式和物理结构不同,导致软包电池的组装形式和生产工艺不同。袋装电池结构如图所示。
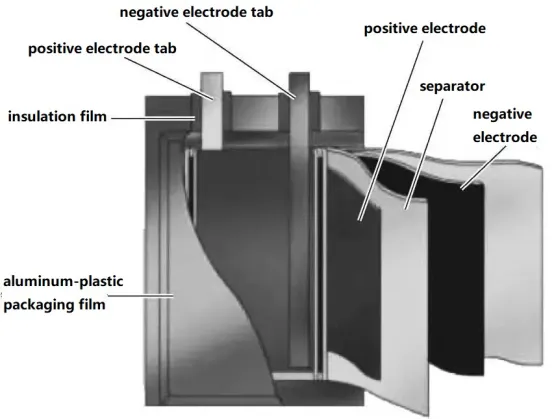
软包细胞结构
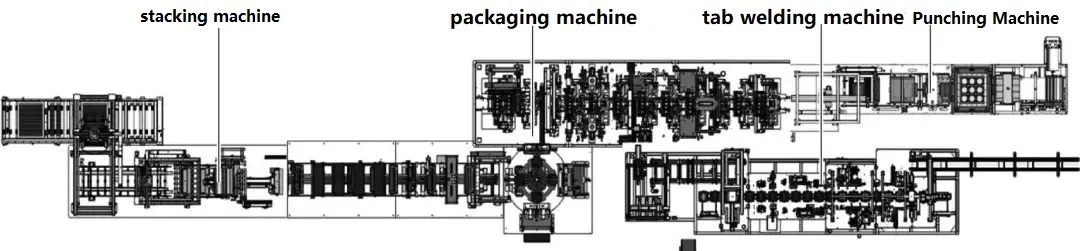
软包电池流水线的生产过程可分为三个部分:第一部分是极耳焊接部分,第二部分是包装机部分,第三部分是坑打孔机部分
软包电池流水线的主要技术指标如下:
(1)产品合格率:≥99%。
(2)生产线的整体生产效率:取决于生产线的要求。
(3)生产线所需操作人员人数:2人。
(4)设备整体利用率:≥98% [计算公式:(24h –停机时间–报警时间)/24 × 100%]。
(5)包装设备合格率:≥98.8%。
3.设备组成和关键结构
软包电池流水线主要由电极片焊接机、包装机和后包装机组成。
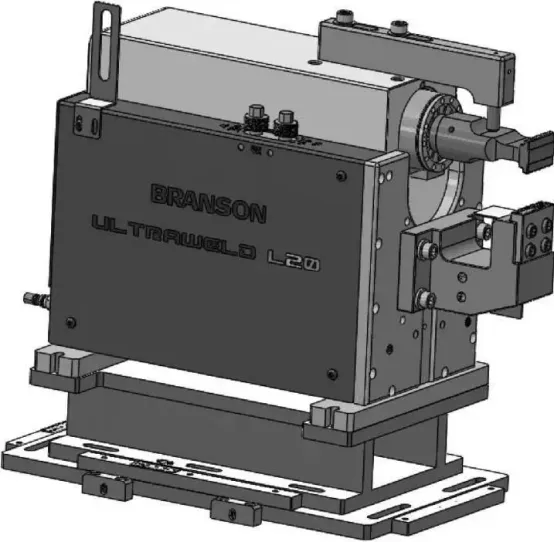
3.1极耳焊接机
极耳焊接机负责折叠和预焊接从堆垛机接收的裸电池的铜或铝极耳。它执行诸如极耳的最终超声波焊接、压平焊缝印记、除尘和粘合剂应用等过程,为随后封装在铝塑料薄膜袋中做准备。电极片焊接机的关键结构包括电芯极耳的预焊接、极耳切割、电芯极耳的最终焊接、焊接压印压平和除尘以及胶粘剂应用。
极耳焊接机对从堆垛机接收的裸电池的极耳进行预焊接和最终焊接。其关键结构包括极耳切割、极耳预焊、极耳到极耳焊接和焊接压印除尘。
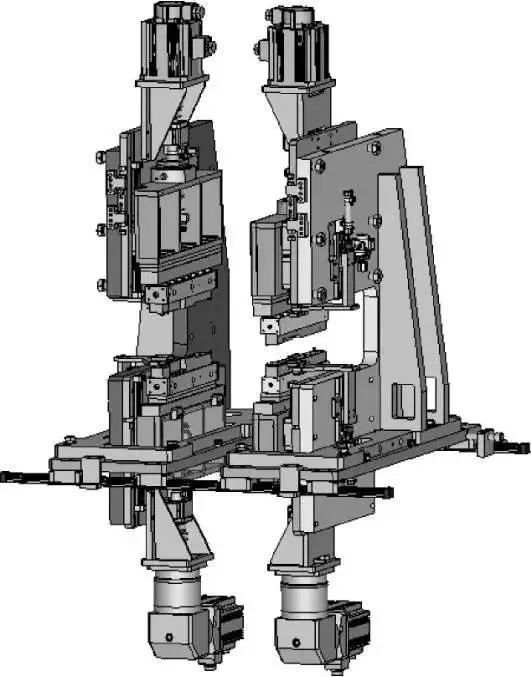
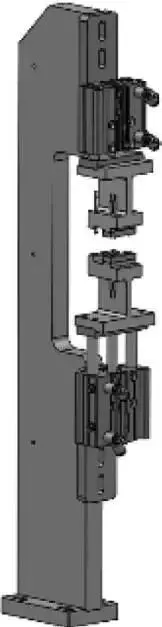
极耳预焊接包括折叠和焊接电池的铜或铝极耳,为最终焊接过程做好准备。该结构的部件包括预焊机、焊机底座、折叠机构和除尘机构。极耳预焊的结构如图所示。
1)标签的预焊接
这种结构的功能和作用用于实现极耳的超声波预焊接。焊机下方的焊头是固定的(焊头、焊座、底座的设计需要与客户沟通)。电芯片就位后,将气缸压下托盘夹,达到焊前工作高度,边焊接边收集灰尘;并且在焊接过程中将标签聚集在一起。焊接后的电池芯上设有保护装置,防止焊渣落入电池芯内。下焊头设有防尘罩,防尘罩内设有吸尘装置,包括鼓风装置和吸尘装置,确保焊接粉尘能净地吸收;吸尘风速要求为≥15m/s。
对于极耳预焊的焊接位置精度,要求上下方向的偏差为≤±0.2mm,左右方向的偏差为≤±0.2mm。
备注:焊接包装线需要根据焊机连接数据,并能采集关键焊接参数(焊接参数包括能量、功率、时间、压力等),并能接收相关焊接异常信息,执行异常报警和放电单元NG。
2)极耳切割
极耳切割结构主要用于将预焊接的铜和铝极耳切割整齐。它由上下切割刀片、上下切割刀片导向机构、除尘机构、废料导向溜槽、上气缸、下气缸等部件组成。电极片切割的结构如图所示。
这种结构用于实现预焊后正极片的自动切割。切削工具使用带有类金刚石碳涂层的SKD11以防止粘附。以一对一的方式使用备份工具,可以根据客户要求对SKD11进行碳化钨处理。有一个数字千分尺用于调整切割位置,方便手动调整,切割刀片切割到预焊焊缝印记上。切割片长度的可调范围为0-10mm,切割精度为±0.1mm。切割刀片的使用寿命要求是至少可以使用300,000次(每200,000次提醒磨一次),并且可以重新磨10次以上。切割刀片处设有防尘罩,将切割机构与外部环境隔离开来。防尘罩设有吸尘装置,通过吸附切割废料和灰尘来确保清洁度。除尘气流速度要求为≥15m/s。切割机构内有一个接收箱,用于收集切割的铝箔材料。切割板采用凸面设计,弹簧力可调。切割前,将两侧的保护膜压紧,以防止保护膜翘曲,影响后续工序。
3.极耳最终焊接
极耳最终焊接工艺包括正/负极极耳进料机构和正/负极极耳的主要焊接工艺。
(1)正/负极耳送料机构:正/负极耳送料机构由极耳式极耳式送料机构、伺服升降装置、极耳吸料机构、二级定位机构、极耳机构检测传感器等组成。它用于实现正极片和负极耳的自动进料。
正/负极耳进给机构的主要功能是将极耳导电手柄和预切正/负极耳焊接在一起的关键过程。在实际生产中,极耳需要连续进料。为了确保在不停止机器的情况下不间断地更换材料,需要在机构中设计一个极耳缓冲机构。标签检索机器人需要具有旋转功能,以防止标签方向出错。标签的极性检测是为了检测正极和阴性标签的极性,以防止人为错误放置。由于焊接过程中单元片和极耳之间的定位精度,因此需要极耳的定位机构。根据客户要求,定位参考点可以是标签和PP胶粘剂的侧面或标签的周围环境。凸耳的进料机构可以牢固地固定正确定位的凸耳,并将其输送到预定位置以进行最终焊接。由于位置精度要求,驱动机构是伺服电机和滚珠丝杠的组合,以确保精度。正/负极耳进料机构如附图所示。
正/负Tab页加载机制的功能和动作如下:
一个。弹匣机构上共有5个弹匣。正反杂志通过颜色和标记来区分。一个弹匣一次可以容纳200个标签,一次进纸可以连续工作2小时以上。
b.标签对来料的尺寸精度:在接收材料时,标签被手动放入夹子中。电池采用刷涂、吹气和电振荡程序来防止多件,确保100%的合格率。导电手柄位置的检测用于识别正极和负极。正负端子夹以颜色区分。6个料仓的转移由伺服系统完成,材料装载位置有传感器检测材料的存在。采用伺服旋转,避免定位偏移过大,可能导致耳耳变形。
c.极耳定位使用机械定位来定位导电夹和极耳胶的短边。
d.夹紧和加载时,使用手指气缸将导电手柄夹在最大区域,以避免导电手柄滑动。伺服传输方式实现精确进给,极耳定位精度±0.2mm。
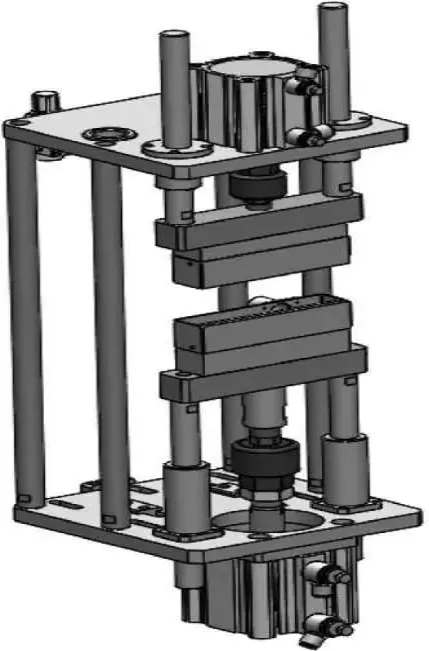
(2)正/负极极耳的主要焊接。正/负极耳主要焊接的主要部件有超声波焊接机、定位机构、检测系统、集尘系统等。正/负极耳的主要焊接如图所示。
正/负极耳的主要焊接用于实现正反极耳的超声波焊接。该机构的下焊头是固定的,片子焊接在电池片的上方。整台焊机可水平调节,以适应工艺要求。
正/负极耳主焊技术特点如下:
a.焊头/底模的一次性使用寿命为≥50,000次,可在单个表面上重磨5次以上。焊头/底模与极耳焊接层数的兼容性为≤50层。焊头/底模和底座的设计需要与甲方沟通。
b.焊接后,有装置检测凸耳是否焊接到导电手柄上。如果电池有任何问题,系统将生成警报并触发NG(非正常)设备。
c.焊接的关键参数(焊接参数包括能量、功率、时间、压力等)可以设置上下限。具有在线检测、异常报警、电池NG排除、上下焊接预留导电手柄等功能。
d、集尘处理:焊接后的电池芯侧面设有保护装置,防止焊渣落入电池芯内。制作防尘罩,跟随焊头的运动,在超声波焊接时打开灰尘。吸尘风速为20m/s,可有效吸走金属粉尘。
e.精度:极耳定位精度为±0.2mm;焊接位置精度上下±0.2mm,左右±0.2mm。
f.焊接参数就地存储,并具有与MES连接的接口功能。增加了手动除尘口,焊接工位具有检查焊片是否存在和焊后检测焊片的功能。
4)标签焊接的除尘
极耳焊痕的除尘对电池芯的良率和安全性能至关重要。主要原因是超声波焊接过程是机械摩擦焊接,会产生大量的金属粉尘,许多尖锐的毛刺会脱落在焊痕上。有时它也会成为金属粉尘的来源。这些金属粉尘进入电池本体后,会刺穿正负极之间的隔板,导致电池短路,引发火灾等危险事故。
极耳除尘分为焊接冲压压平机构和焊接冲压二次除尘机构两部分。
(1)焊接和压平机构。焊印压平是指在极耳片最终焊接后,将焊印压平。其主要目的是在超声波焊接后将焊印表面的焊印毛刺压平或去除,以利于焊印的二次除尘。准备工作很容易。该机构上还有一个吸尘口,用于去除直接压下的焊渣中的灰尘,易于吸走。
焊接冲压平机构由上气缸移动机构、下升降机构、压块、真空罩等组成。主要用于实现极耳焊接后的成型,成型压力为≥500N,压板材料为PEEK。定型后无翘曲,定型位置可调,焊接压平机构如图所示。
(2)焊接压印二次除尘机构。焊接印记二次除尘的目的是独立清除焊接印记中的灰尘,彻底清洁平整机构未清除的金属灰尘。
二级除尘机构主要由圆筒运动机构、密封室、毛刷机构等组成。其功能和作用如下:使用清洁装置清洁焊接区域,确保清洁后没有大于50μm的异物。它还具有除尘装置,确保对粉尘进行彻底清洁,除尘气流速度为≥20m/s。清洁过程不应对电池单元造成二次污染,也不应损坏电极片。焊接压印二次除尘机构如附图所示。
焊接印记的压平机构和二次除尘机构确保了胶粘剂应用和包装以及热空气融合等后续过程的顺利进行。
5.极耳涂胶和检查
标签印记的粘合是通过胶带实现的,以确保在后续包装过程中,印记的不平整表面不会直接接触铝塑薄膜,从而避免了刺穿PP粘合剂并直接接触铝层的风险。
标签涂胶和检查的过程由两部分组成:标签涂胶机构和标签涂胶检查机构。
(1)标签上胶机构:标签上胶机构由胶带送料机构、张紧机构、导向机构、自动切割机构、吸胶机构等组成。涂胶过程涉及单独的上下涂胶机构。涂胶机构分为上涂胶机构和下涂胶机构,两者的工作方式相同。胶带长度兼容≤100mm,宽度为≤25mm。它确保蓝色胶带完全覆盖印记和标签的底部边缘,粘合整齐,无需将PP粘合剂压在导电手柄上。在涂胶机构中,蓝色胶粘带在拉扯过程中的张力由弹簧张力控制,以确保蓝色胶粘带在涂胶后不会回弹、起皱或脱落,从而产生完整和适当的粘接。粘性吸头的材料是硬质阳极氧化A6061,不会损坏标签。可实现±0.2mm的涂胶位置精度、±0.2mm的垂直对位精度、±0.2mm的切割精度。极耳粘合机构的示意图如附图所示。
(2)极耳涂胶检查机构。极耳涂胶检查机构的主要目的是检测电池单元的极耳印记处是否存在胶带,并将胶带压平。
涂胶检查机构主要由气缸、压力块、探头和其他部件组成。检查标签印记粘合的机制如附图所示。
经过极耳涂胶机构和涂胶检查机构的处理后,有效避免了焊接印记对铝塑膜包装的影响。
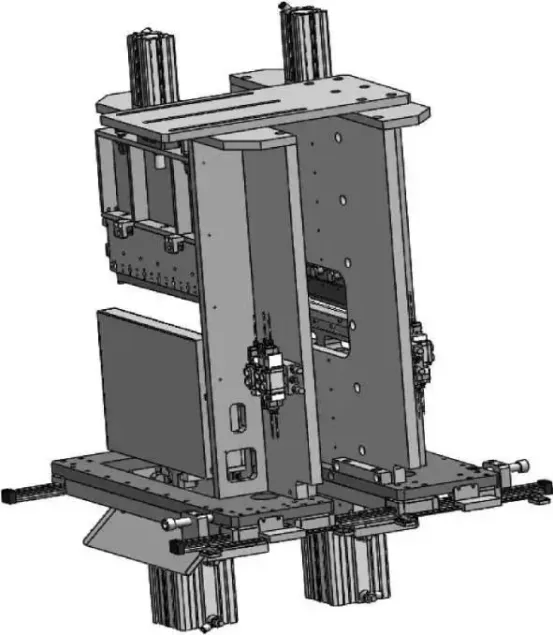
(2)铝塑膜冲孔机
铝塑膜冲孔机主动展开铝塑膜线圈,按顺序冲出铝塑膜袋,以满足电池的尺寸要求。铝塑膜冲孔机的关键结构主要包括放卷纠偏机构、分切机构、冲孔机构、切割机构等。
(1)放卷纠偏机构:放卷纠偏机构是铝塑膜冲孔机的前部。它负责铝塑膜的加载、更换和放卷,以及在正常运行期间对铝塑膜进行实时校正。
放卷纠偏机构由气胀轴、铝塑膜定位机构、主动放卷机构(包括电机、减速机等)、张力控制系统、收料平台、纠偏系统等组成。其功能和动作如下:手动上料、料卷气缸定位、光电传感器检测物料是否存在、带有铝塑切膜刀和压带板的手动送料平台,以及带料平台下方的负压吸尘装置。铝塑膜的张力由张力控制器和磁粉制动器调节,以保持恒定的张力和一致的进料方向。它具有双放卷结构,以确保整条生产线的及时运行和效率。放卷和校正机构如附图所示。
放卷纠偏机构的相关精度参数如下:
张力范围:0-100N
张力控制精度:±3N
卷径检测:检测范围≥ 400mm,检测精度要求±0.1mm
为确保铝塑膜在运输过程中不被损坏,对导辊进行了特殊处理和加工。导辊采用黑色硬质阳极氧化铝合金A6061,涂层厚度大于4μm,表面粗糙度Ra0.8。使用寿命可超过3年(在保证设备效率、利用率和产品合格率的情况下)。滚子轴采用低摩擦轴承,以最大限度地减少旋转阻力。
(2)分切机构:分切机构主要由直线轴承、立柱、圆柱、切割刀片和刀片固定板组成。其主要功能和作用如下:在冲孔口袋之前,它用于通过在两层铝塑膜之间进行切割来释放应力。切割刀片使用艺术刀刀片,便于采购和准备。当材料就位时,平台的真空吸力被激活,上气缸驱动切割机构切割薄膜。切割机构设有吸尘罩,可负向吸取切割过程中产生的灰尘,确保切割废料和灰尘得到有效去除。吸气气流速度要求为≥15m/s。预切割位置精度为0.3mm,可根据需要选择切割长度调整范围。分切机构如附图所示。
分切机构通过在铝塑薄膜上切割狭缝,为铝塑薄膜的冲孔做准备。
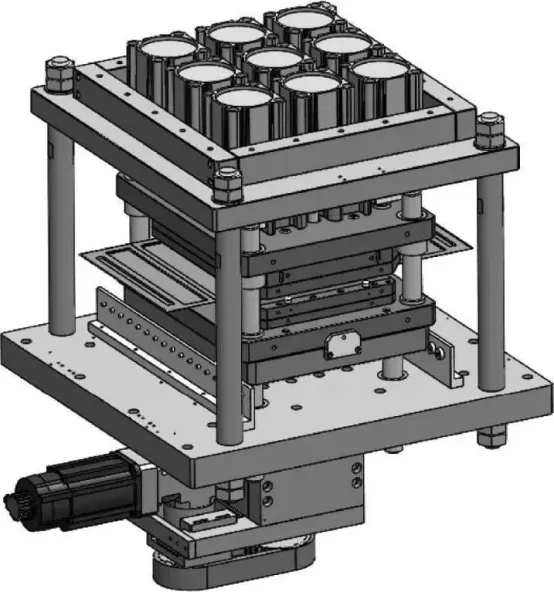
(3)打坑机构。冲孔机构主要由壳体冲孔模具、伺服电机、减速机、滚珠丝杠、气缸、导轴等组成。
冲坑机构采用多个气缸对铝塑膜进行压缩,伺服电机驱动滚珠丝杠对凹坑进行冲孔。深度可以通过小袋器自由设置,设置范围为2至12毫米。铝塑膜的压制力由伺服调节。模具具有冲定位孔的功能。它采用双坑冲孔方法。冲壳的尺寸精度可控制在±0.1mm以内。定位销孔采用气缸冲孔,冲孔精度高。±0.1mm,针孔废料从下模板两侧排出。设备冲模两侧装有格栅(垂直于皮带输送方向)。当检测到异物时,警报将发出哔哔声,机器将停止。维修设有安全保护功能,防止维修人员被模具夹住。伤害。
冲孔机构有换模要求,因此每台冲床都配有模具小车,以方便换模。
冲孔机构使用多次,因此材料选择非常重要。主要有以下几种材料类型:底板45#回火+镀镍,顶板45#回火+镀镍,主柱45#回火+镀铬,上模板SKD11+淬火+氮化,凹模SKD11+淬火+氮化,冲床KD11+淬火+氮化,冲床固定板45#+镀镍。凹坑冲孔机构如图所示。
(4)切割机构。切割机构主要由导杆、切割刀片、刀片固定座、上气缸、下气缸、除尘机构等组成。其功能和作用是将铝塑薄膜切割成固定长度,在切割过程中带有除尘装置。切割刀片的使用寿命通常为300,000至500,000次切割(带有使用寿命提醒警报),并且可以磨10次以上。切割时,切削刃配有吸尘系统。吸风气流速度要求为≥20m/s,铝塑外壳的切割精度为±0.2mm。切割机构如附图所示。
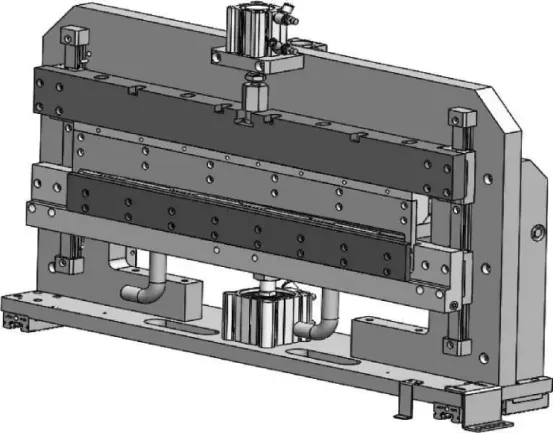
(3)包装机
包装机将极耳焊接机焊接的电池芯和冲孔机冲压的铝塑膜组装成初步的电池形式。包装机的关键结构主要包括包装机夹具、折叠机构、切割机构、顶/侧封机构等。
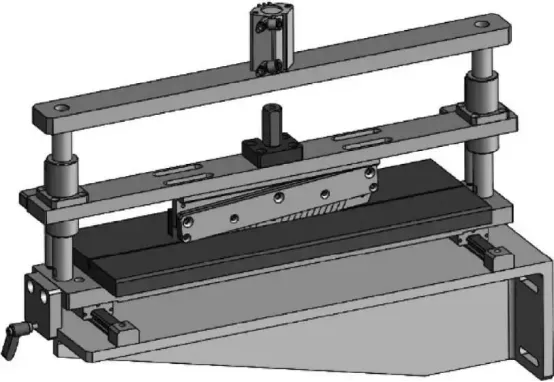
(1)包装机夹具。包装机夹具是铝塑膜和电芯组装完成各种工序的重要载体。它由齿轮齿条、角轴承、上腔、下腔、吸盘、定位块等组成。其工作原理是将下腔固定在支架上,真空吸盘合理分布;上腔由夹具翻转机构通过齿轮齿条翻转,可实现开、关、维护三位要求,真空吸盘分布合理;铝膜放入模腔后,真空吸盘工作确定铝膜的位置,铝膜的位置在每个工位的流动过程中保持不变。由于铝塑膜为袋体,为保证铝塑膜坑与电芯之间的相对尺寸位置,上下腔均采用仿制电芯外形尺寸进行加工,加工精度可达±0.2 mm,以使卡箍尽可能轻量化,保证强度要求,材料一般为A6061,表面氧化,经久耐用。折叠后,铝膜的边缘对齐为±0.2mm。包装机夹具如图所示。
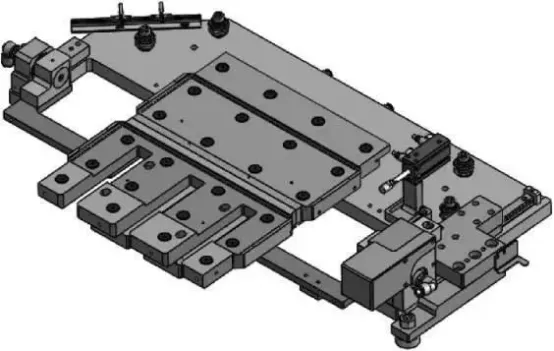
折叠机构主要由升降油缸、进/缩回油缸、直线导轨、折叠板等组成。其主要功能和动作如下:升降油缸保持在顶部位置,进/缩回伺服将折板推至铝膜折线正上方的位置。然后升降气缸向下移动以压制铝膜,使折叠板的边缘与薄膜的折叠线对齐。旋转夹具关闭,前进/缩回气缸拉出折叠板,完全折叠铝膜,并移动到下一个工作站。在这个阶段,铝塑膜内部没有电芯。折叠机构的整体精度可达±0.2mm。折叠机构如附图所示。
(3)切割机构。切割机构主要用于切割包装机上的铝塑膜。它主要由上刀驱动气缸、下刀驱动气缸、上刀、下刀、压紧机构、直线导轨、除尘机构、减压器组成。它由阀门等组成,切割位置有千分尺,方便手动调整。其功能和作用如下:转盘旋转一个工位,下气缸移动,下刀抬起,上气缸移动,弹簧压板接触铝塑膜,然后切割铝塑膜,同时气缸复位。切割机构如图所示。
切割机构的下切割机构包括收料箱,用于收集切割后的铝塑薄膜。切割机构配有防尘罩,在切割过程中将切割区域与外部环境隔离开来。防尘罩内含集尘装置,包括吹扫装置和负压除尘装置,确保切割废料和粉尘得到有效收集。吸尘气流速度要求为≥20m/s。顶边切割精度为≤0.2mm,切割后顶边对位精度也为≤0.2mm。切割刀片的使用寿命为300,000至500,000次切割(带有刀片磨刀提醒),可磨10次以上。使用数字千分尺确保0.01mm的调整精度。
(4)顶部/侧面密封机构。顶部/侧面密封机构主要用于电池的顶部或侧面密封。它主要由伺服电机、滚珠丝杠、直线导轨、缓冲机构、极耳定位机构、微调机构、NAK80密封头、温度控制器、加热管、热电偶等部件组成。其功能和作用如下:封口采用电加热加热,封口头温度可从室温调节至250°C。设备运行期间,封口头的整体温度偏差小于±3°C。加热管的功率为1500W,使用寿命为一年。控温精度为≤5°C。从室温加热到200°C只需不到10分钟。封头加热座设计有隔热板进行温度补偿,确保在高速密封时温度保持在所需范围内。电池旋转到该工作站后,上下伺服电机同时驱动滚珠丝杠关闭上下密封头进行热封。密封压力调节范围为0至20kgf/cm2。密封头设计有凸耳槽。电池本体与封口头之间的间隙可调,并有数字千分尺进行调整。封口时间可在0到8秒之间调节,调节精度为0.1秒。极耳区域的密封精度为±20μm,而非极耳区域的密封精度为±15μm。顶部/侧面密封机构如附图所示。